



Your cart is empty.

3DR Quad Zero Standoff
$14.90
The QZPro represents the vanguard of aerospace technology. This is not merely an unmanned aerial vehicle; it is an advanced platform cultivated from extensive experience in autopilot systems, meticulously designed to ensure exceptional safety and reliability. Benefit from cuttingedge innovation facilitated by the integrated Micro Companion Computer(MCC), a low-power interface enabling the development of custom applications and experimental frameworks.
Consider the potential applications: streamlined prototyping using OpenMV and MicroPython, the implementation of sophisticated vision and artificial intelligence systems, the orchestration of intricate multi-drone formations, and the facile incorporation of specialized sensors via QWIIC compatibility. Dedicated libraries ensure robust communication with Ardupilot and PX4 via MAVLink, augmenting the capabilities of the autopilot. The QZPro facilitates not only flight, but also research, innovation, and the expansion of technological boundaries.
Key Features:
Compact Design :
208.5 × 194 × 60 mm (without propellers)
Weight:
327 gm (without propellers)
Solder-free assembly:
Our solder-free connections let you quickly snap components together and get started immediately. Enjoy simple, fast assembly for everyone, regardless of technical skill.
Specifications:
| Autopilot | |
| Component | Description |
| Processor | STM32H743VI Arm® Cortex®-M7 core |
| RAM | 1MB |
| Internal Flash | 2MB Flash |
| External memory | 1MB Page EEPROM |
| Barometer | DPS368 |
| IMU | 2x Gyros | 2x Accelerometers |
| Magnetometer | Yes |
| MCC(Micro Companion Computer) | |
| Component | Description |
| Processor | STM32H743VI Arm® Cortex®-M7 core |
| RAM | 1MB |
| Internal Flash | 2MB Flash |
| External Flash | 128Mb QSPI |
| LPC(Low Power Companion) | |
| Processor | ESP32 |
| RAM | 512 KB |
| Flash | 8MB Flash |
Versatile Interfaces:
| Autopilot | |
| Count | Description |
| 7x | UART Ports | 3x with flow control |
| 8x | PWM outputs | 4 BIDIR DShot capable |
| 3x | GPIO pins |
| 1x | I2C |
| 1x | MMC/microSD card slot [available externally] |
| 1x | SPI |
| 1x | USB |
| MCC(Micro Companion Computer) | |
| Count | Description |
| 2x | UART Ports | 1x with flow control |
| 1x | On-board camera |
| 1x | I2C | QWIIC compatible |
| 2x | SPI |
| 1x | USB |
| LPC(Low Power Companion) | |
| x1 | UART Port |
| x1 | LPUART Port |
| 4x | GPIO Pins |
| 1x | I2C |
| 1x | SPI |
| 1x | USB |
| 1x | WiFi / BLE |
Flight Stack Compatibility:
Supported by Ardupilot and PX4 stable releases.
Main Board Communications Architecture:
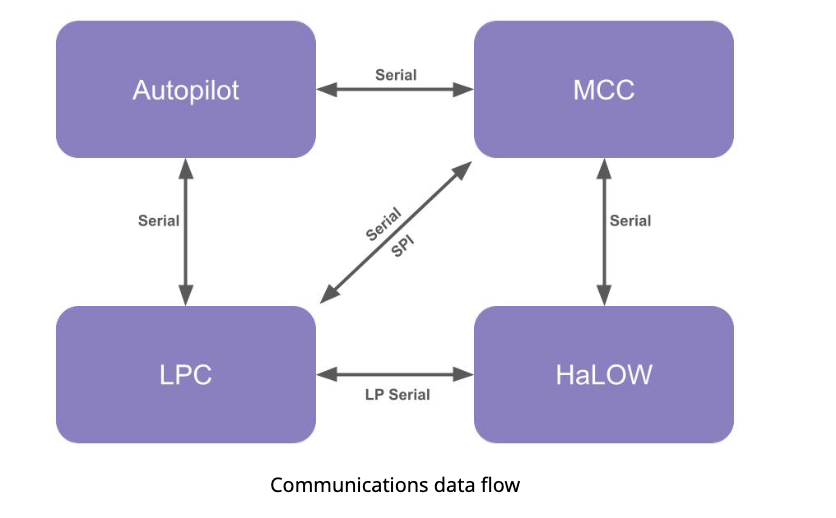
This board breaks out every single pin from the OEM H7 autopilot into
0.1″ through-hole headers, making it the most versatile carrier board
but not exactly the smallest.
MCC:
The Autopilot has access to a separate, lightweight, and low-power companion computer to handle complex mission instructions via a dedicated communication interface. This offloaded processing empowers the Autopilot with advanced capabilities, ranging from the detailed experimentation of a novel state estimator, allowing for iterative improvements in its core algorithms, to sophisticated AI-driven object detection using its onboard camera, enabling real-time analysis of its surroundings.
The adoption of OpenMV and MicroPython within the QZPro platform empowers users to integrate external hardware and software ecosystems effortlessly. Its versatile connectivity options, including the user friendly QWIIC interface for creating novel drivers for unsupported flight stack peripherals, extend to advanced networking features, facilitating collaborative swarm operations and distributed computational
workloads.
LPC:
Ensuring extended flight operations, the QZPro’s power management strategy reserves battery capacity solely for flight time. The Low-Power Companion (LPC) manages the necessary pre-take-off preparations, allowing the user to focus on mission planning rather than system initialization. During flight, the LPC grants seamless access to all Autopilot’s system parameters and controls through its reliable wireless communication interfaces, empowering the operator with full situational awareness and the ability to make informed decisions in real-time.
Smart Battery:
Both Autopilot and LPC units share the data bus with the battery IC, where parameters such as SoC, current draw, maximums, and number of cycles, among others, can be read to make decisions for low power management.
Users have the flexibility to implement measures at different phases of the operation cycle of the vehicle based on this information.

HaLow:
The second radio onboard the QZPro is a 802.11ah module, which is a low power, sub-GHz radio supporting several bandwidth settings. This is plug and play compatible with our new Telemetry module, meant to be used on the ground side or as middle nodes in some cases.
This platform provides a basic web server application for telemetry relay, network and link configuration. The technology is mesh-capable, pushing the boundaries of the whole platform to a higher echelon.
Kit Includes:



